1.6 灵犀X2 传感器说明
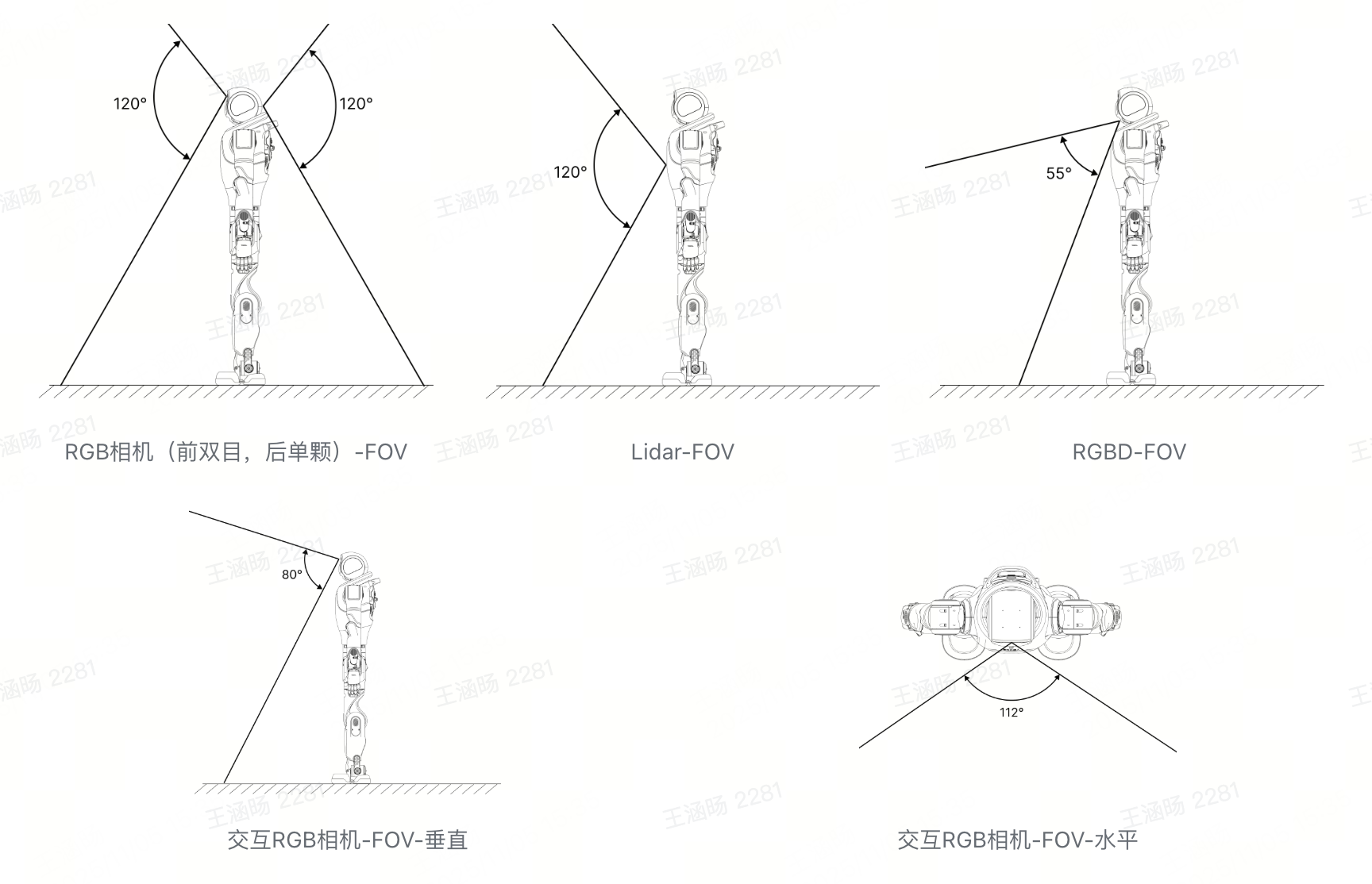
1.6.1 传感器能力及视场角示意图
版本 |
感知配置 |
感知能力 |
|---|---|---|
X2 旗舰版 |
激光雷达 |
激光雷达: |
1.6.2 传感器具体参数
激光雷达
厂家 |
型号 |
波长 |
水平视场角 |
竖直视场角 |
|---|---|---|---|---|
速腾聚创 |
E1R |
940 nm |
120°(-60.0° ~ +60.0°)±1% |
90°(-45° ~ +45°) |
RGBD摄像头
厂家 |
型号 |
激光波长 |
分辨率 |
帧率 |
深度FOV |
彩色FOV |
|---|---|---|---|---|---|---|
奥比中光 |
Gemini335 |
850nm |
深度:最高 1280 × 800 |
最高 60fps |
90° × 65° ± 3° @ 2m(1280 × 800) |
94° × 68° ± 3° @ 2m |
前视双目RGB摄像头
厂家 |
型号 |
分辨率 |
帧率 |
水平视场角 |
竖直视场角 |
|---|---|---|---|---|---|
森云 |
SDS23NNS1 |
最高 2064H × 1552V |
最高 40fps |
156° |
120° |
前视交互RGB摄像头
厂家 |
型号 |
分辨率 |
帧率 |
水平视场角 |
竖直视场角 |
|---|---|---|---|---|---|
森云 |
SM5M12NJ |
最高 2608 × 1960 |
最高 30 fps |
110° |
80° |
后视RGB摄像头
厂家 |
型号 |
分辨率 |
帧率 |
水平视场角 |
竖直视场角 |
|---|---|---|---|---|---|
森云 |
SM3S23NS |
最高 2064H × 1552V |
最高 30fps |
156° |
120° |
触摸传感器
厂家 |
型号 |
采样频率 |
单击 |
双击 |
三击 |
短按 |
长按 |
滑动 |
|---|---|---|---|---|---|---|---|---|
上海艾为 Awinic |
AW93208GQNR |
最高 250 kHz |
✓ |
✓ |
✓ |
✓ |
✓ |
✓ |
独立惯性传感器(IMU)
安装位置 |
厂家 |
型号 |
类型 |
频率 |
|---|---|---|---|---|
胸部胯部各一个 |
原极科技 FORSENSE |
FSS-IMU16460-DM |
6DoF MEMS IMU |
最高 1kHz 可配置 |