1.8 Coordinate System
When all joint angles are at their zero positions, the coordinate systems of each robot component are distributed as shown in the figure below. Red indicates the X-axis, green indicates the Y-axis, and blue indicates the Z-axis.
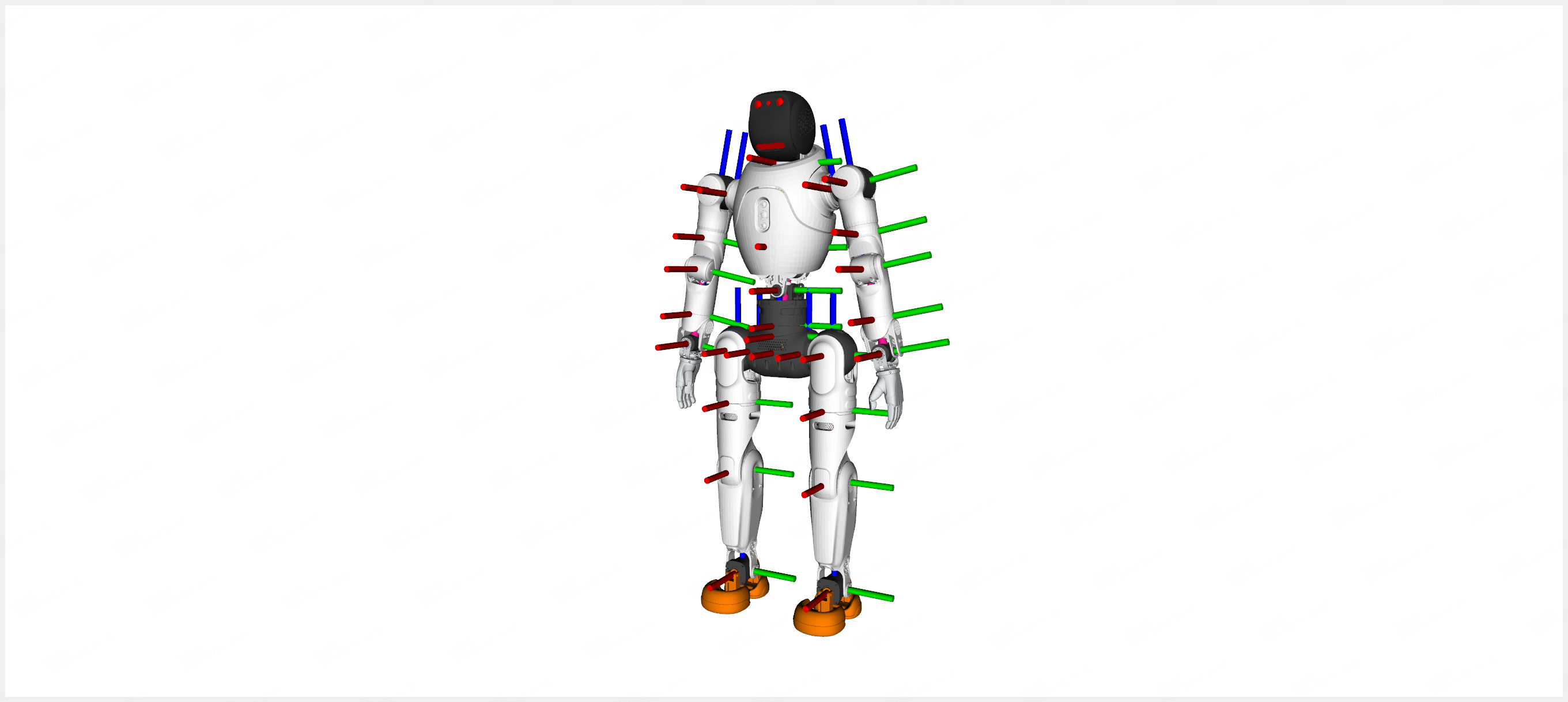
Coordinate System Diagram