2.1 开机指南
2.1.1 吊起开机(需移位机)(SDK推荐使用)
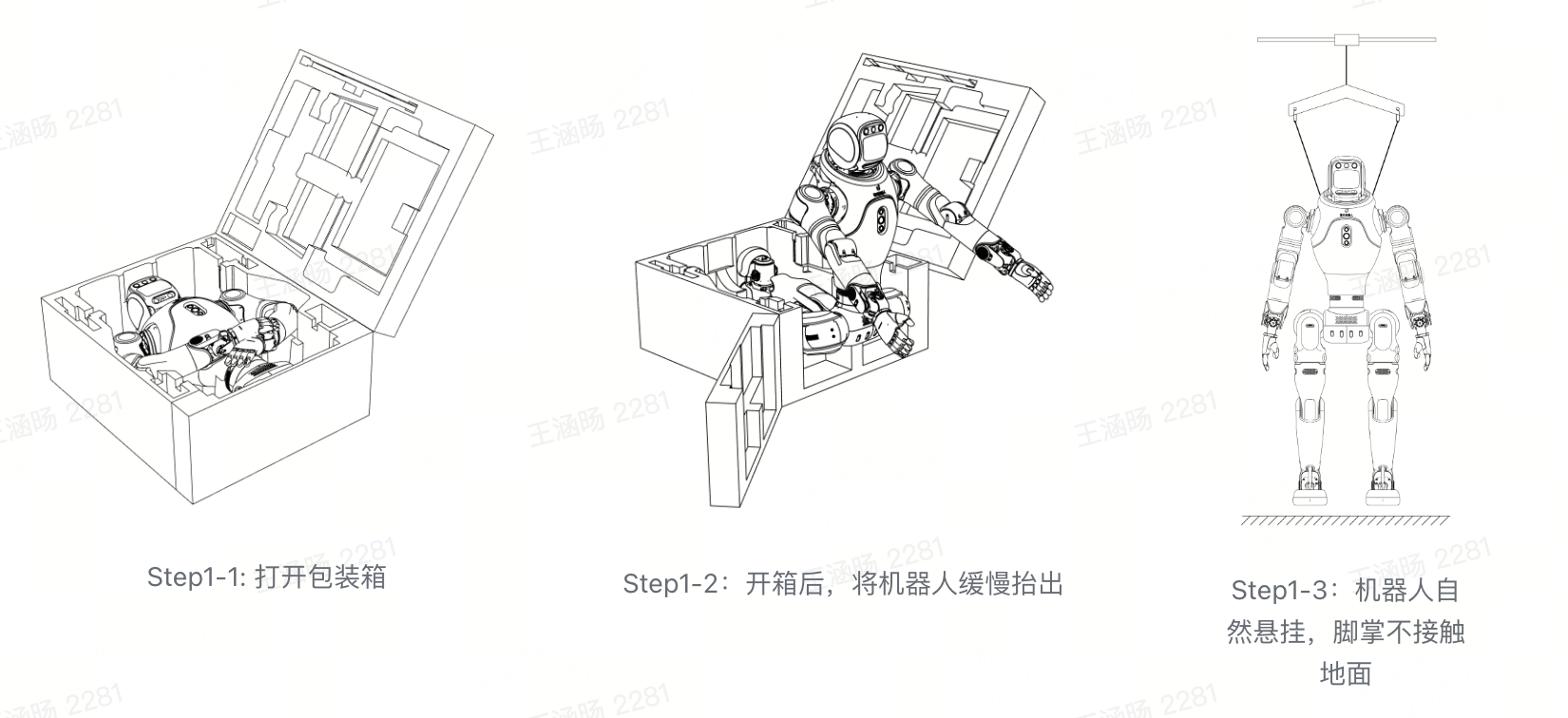
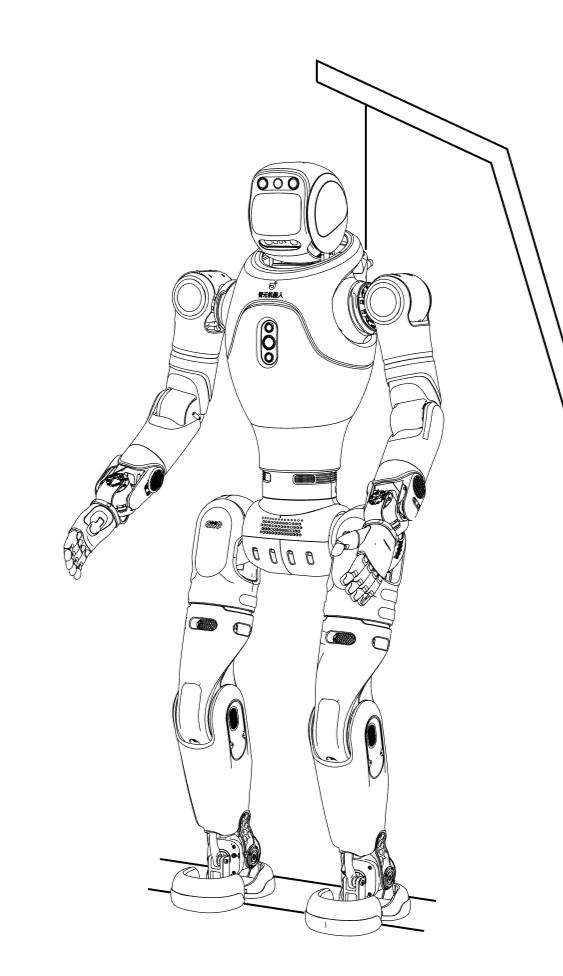
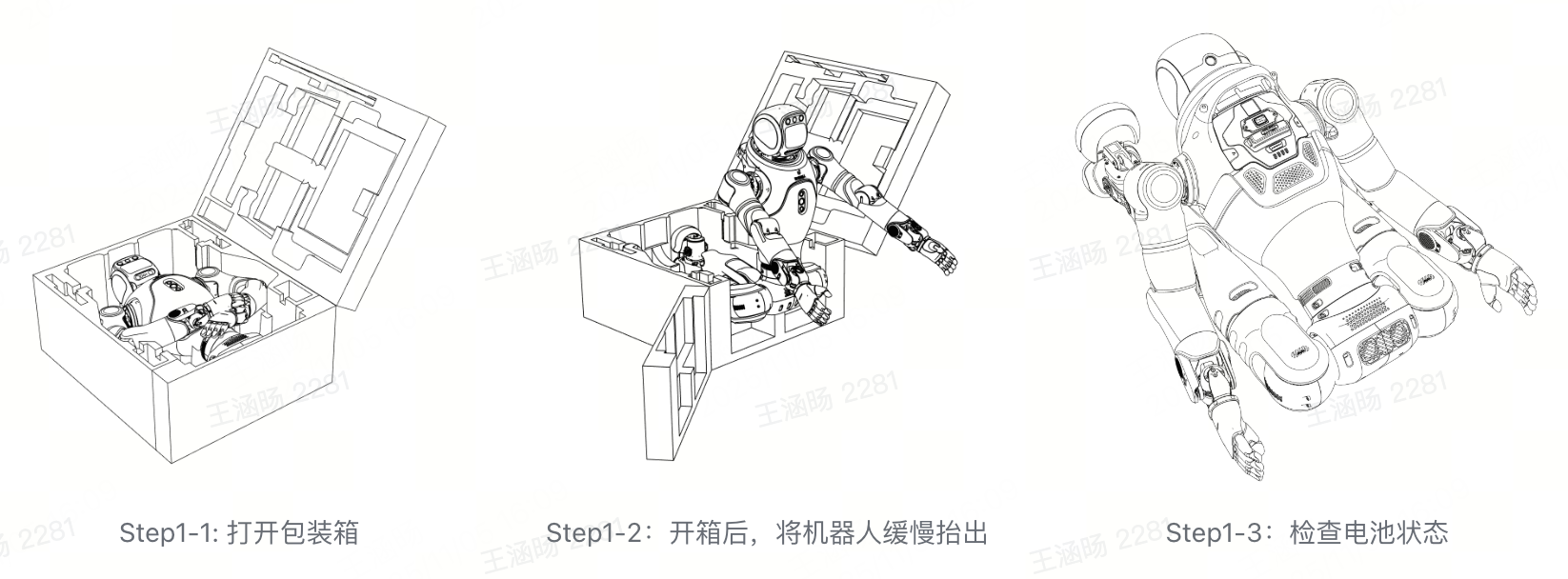
Step 1:开箱抬出并规范摆放 按图示开箱,将机器人缓慢抬出。 使用保护架将机器人自然悬挂,确保其脚掌末端不接触地面。
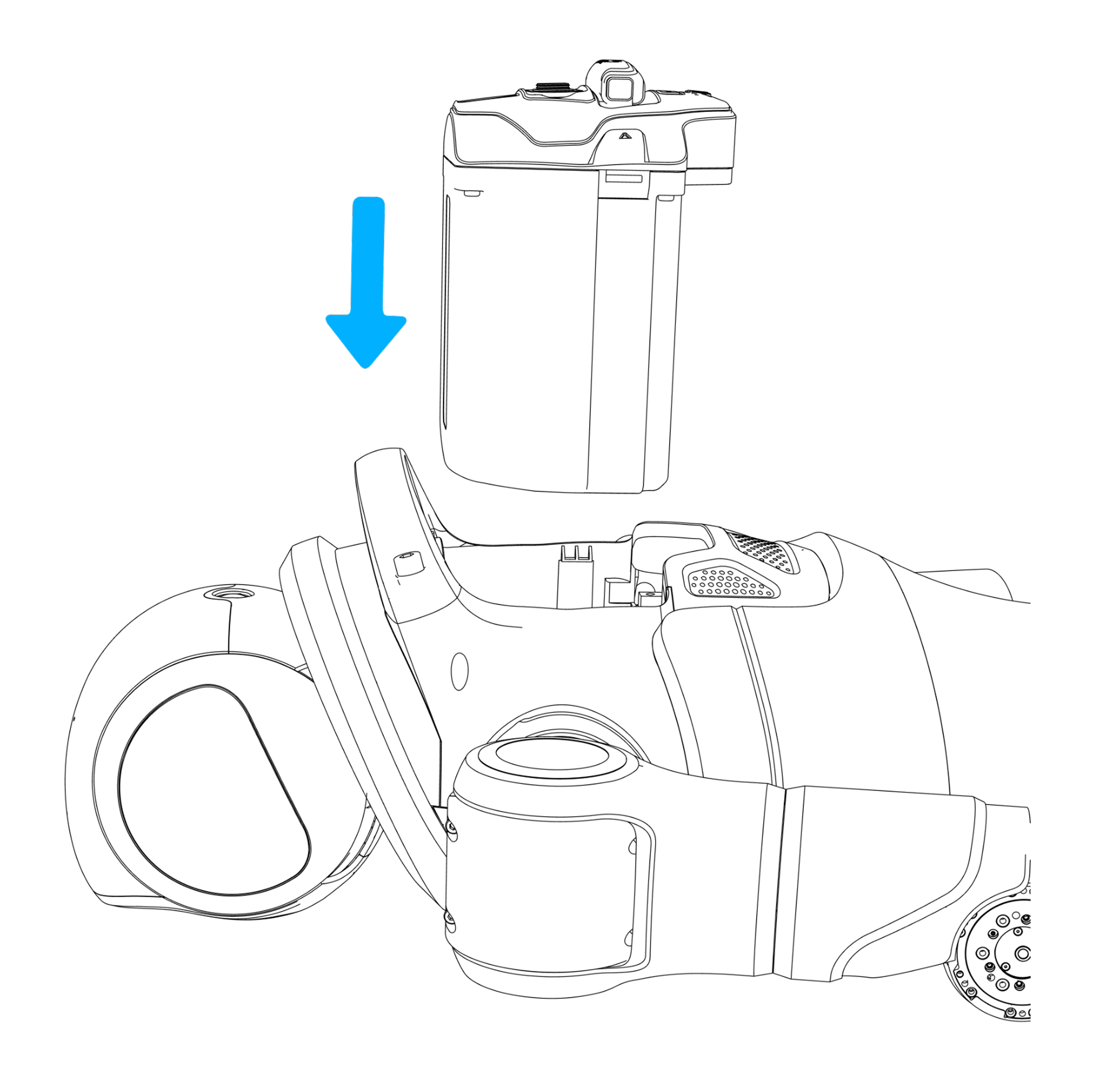
Step 2:安装电池 若未安装电池,可将电池从外向内插入机器人背部的电池槽,插至底部听到 “咔哒” 声即安装成功,安装成功后,请再次按压电池保证电池已经完全插入电池槽。
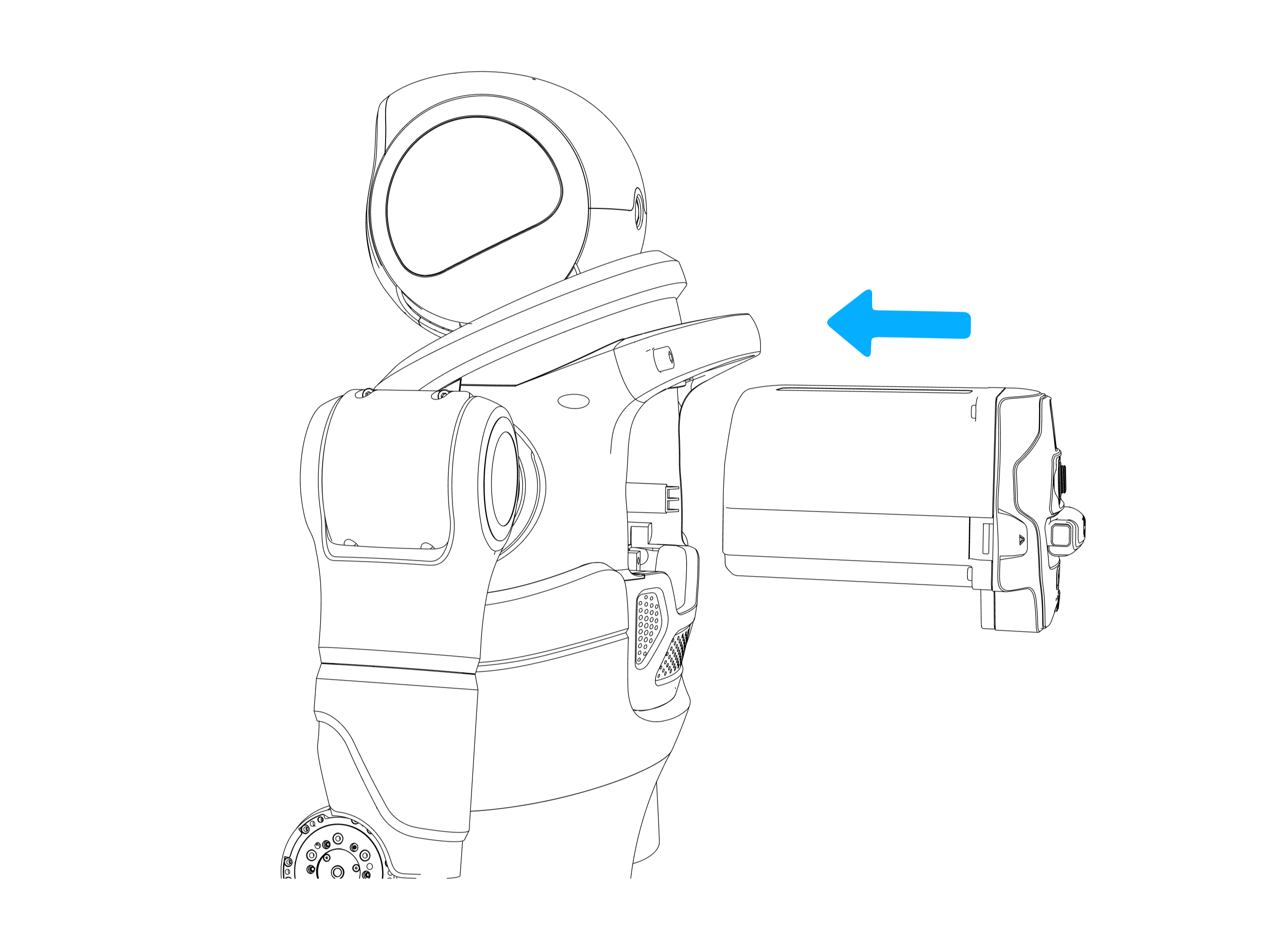
Step2:检查电池安装及安装电池
Step 3: 开机启动
开机时,请先确认电池电量>2 格(电池电量>50%)。
短按电池背部电源键唤醒设备,随后长按 5 秒完成开机。
机器人通电后,电池的 LED1~4 指示灯会在 2 秒内依次跑马亮起,随后稳定亮灭状态指示电池电量。
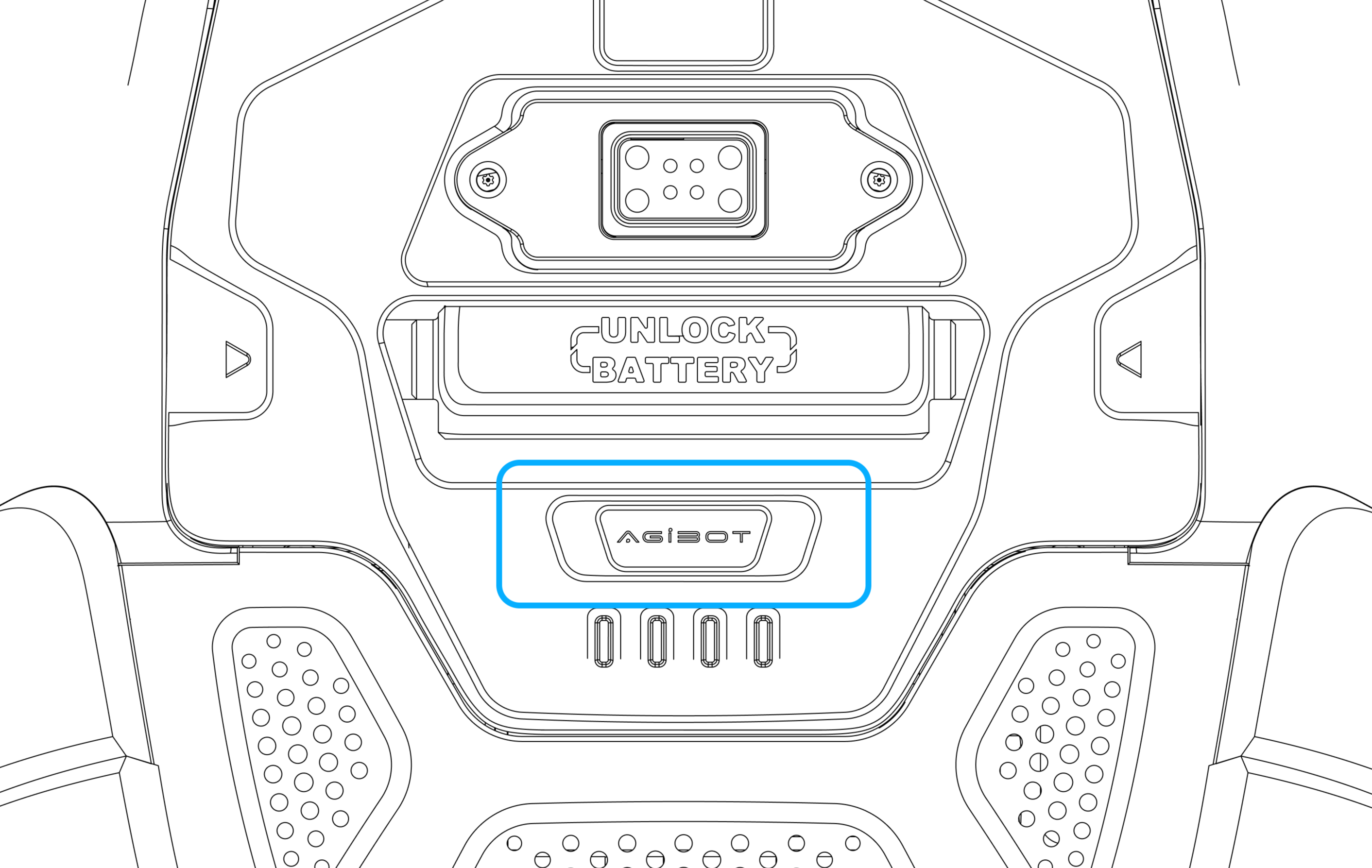
Step 3:按下开机按键
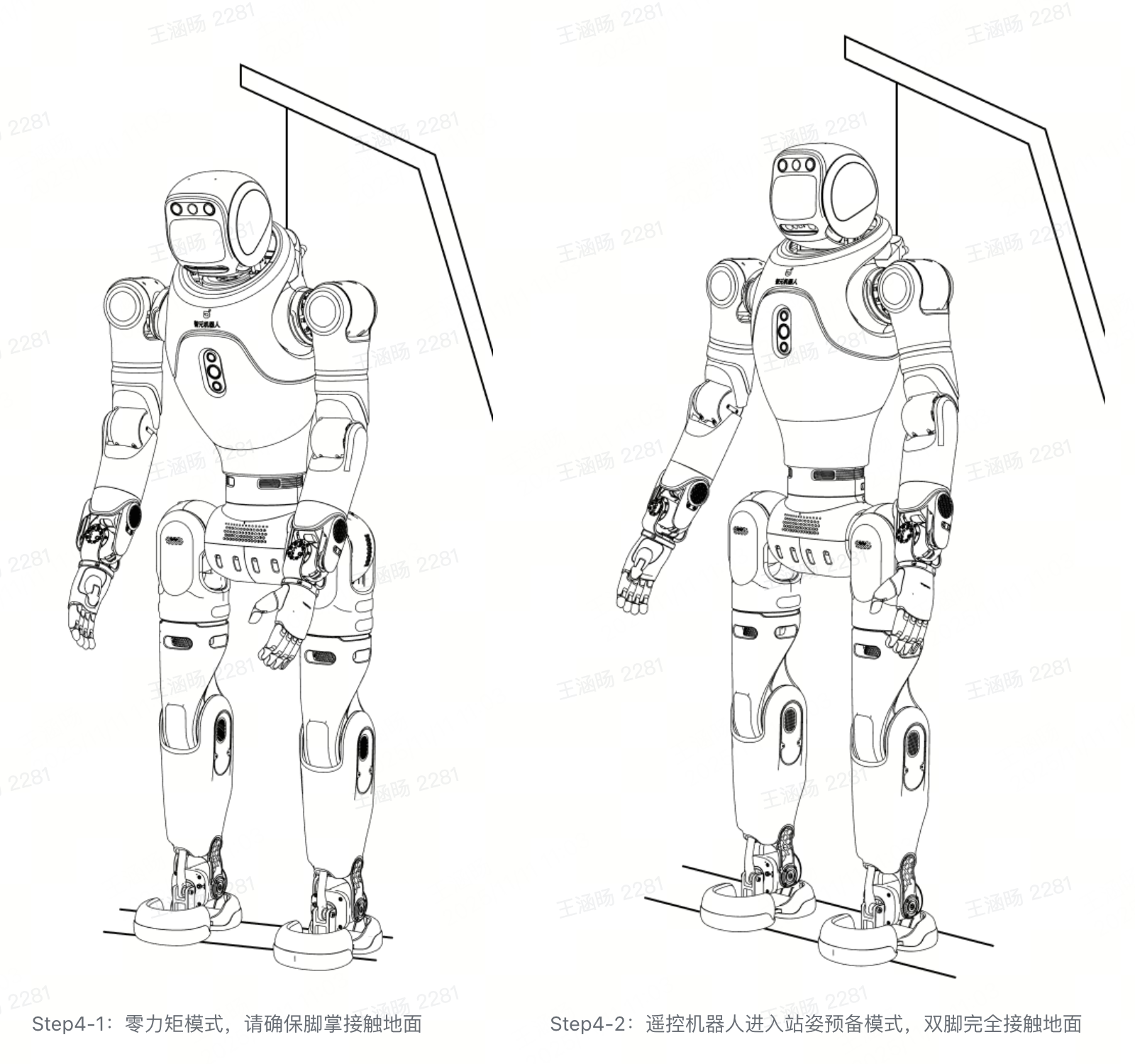
Step 4: 切换站姿预备(位控站立)模式
初始化:开机后需等待约 1 分钟,期间请勿操作。开机后所有关节进入零力矩状态,即表示初始化成功。
调整悬挂:初始化完成后,下降悬挂绳,使 X2 双足完全触地,进入站姿预备(位控站立)模式。
进入站姿预备模式:通过遥控器同时短按【L2+X】按键,确认触发站姿预备(位控站立)模式。
Step 5: 完成机身下降
用电动移位器将机器人缓慢降下,直至双脚完全触地、悬挂绳完全放松且留有余量。
过程中需确保机器人垂直站立,不可出现倾斜。
Step 6: 进入稳定站立(力控站立)模式
重要
注意:在切换稳定站立(力控站立)模式之前,请确保机器人已经下降至地面,双脚与地面完全接触。
进入稳定站立(力控站立)模式:通过遥控器同时短按【R2+X】按键,触发稳定站立(力控站立)模式,具体姿态可参考对应图示。
释放挂钩:待 X2 站立稳定后,可完全释放悬挂挂钩。
稳定站立(力控站立)模式下,机器人轻微推动时可保持平衡,且支持身体运动控制。
Step6:遥控切换进入稳定站立(力控站立)模式
Step 7:进入走跑模式
进入稳定站立模式后,可实现 “推杆即走”:
左摇杆推上下左右,控制机器人行走方向;
右摇杆推动,控制机器人原地旋转。
2.1.2 平躺站起开机(无需移位机)
Step 1:开箱抬出并规范摆放
按照图示打开机器人的包装箱,缓慢将机器人抬出,避免碰撞。
将机器人按照下述图示姿态摆放,便于检查机器人背部的电池电量状态或放置电池。
Step 2:安装电池 若未安装电池,可将电池从外向内滑入背部电池槽,滑至底部听到 “咔哒” 声即安装成功。安装后可尝试拉拔电池,确认其已完全卡紧。
Step2:检查电池安装及安装电池
Step 3: 开机启动
开机时,请先确认电池电量>2 格(电池电量>50%)。
短按电池背部电源键唤醒设备,随后长按 5 秒完成开机。
机器人通电后,电池的 LED1~4 指示灯会在 2 秒内依次跑马亮起,随后稳定亮灭状态指示电池电量。
Step 3:按下开机按键
Step 4: 机器人仰身平躺
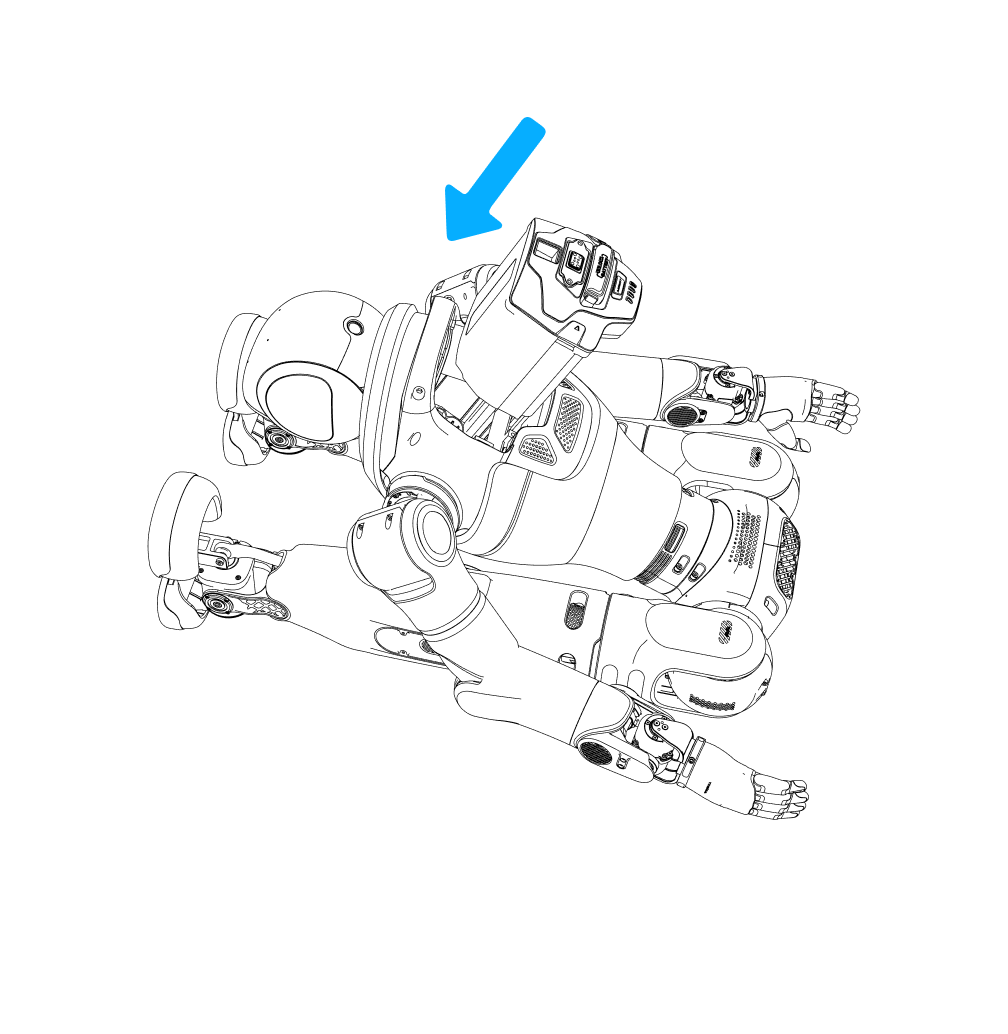
将机器人置为仰身躺姿,需伸展其腿部与手部,确保机器人正面朝上。此时机器人处于零力矩模式。 *请参考下方图示,将头部、腿部、手臂、胸部、腰部、胯部摆至正确初始姿态,尤其注意下肢胯部正面需与整机正面保持一致。
触发平躺站起动作前,需确保机器人四周半径 0.5 米范围内无任何杂物,为动作执行预留充足安全空间。

Step 5: 平躺站起开机
遥控器同时短按遥控【 ↑+△】,可实现机器人平躺站起,此时机器人进入稳定站立状态。
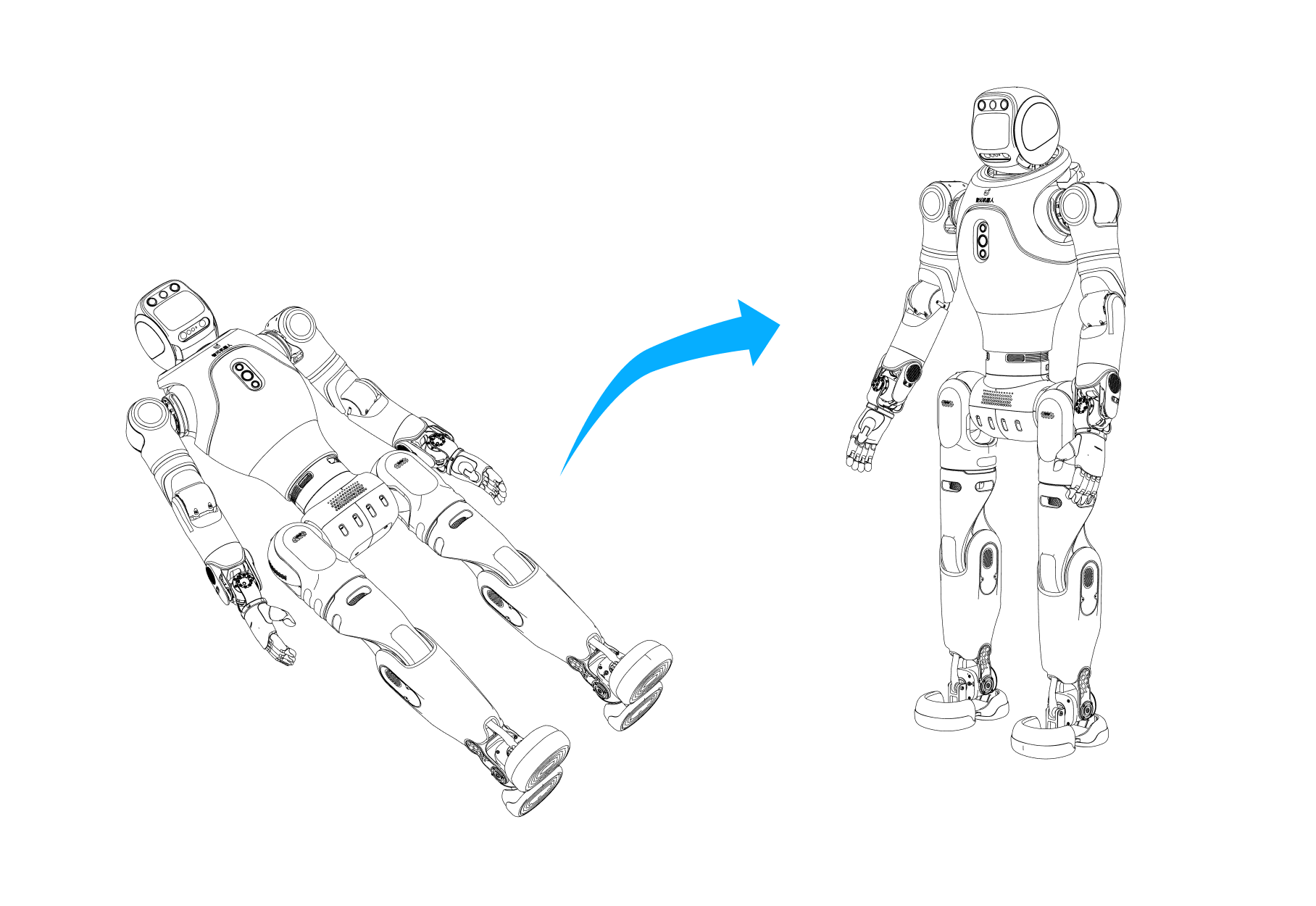
Step 5:机器人从平躺状态自动站起
Step 6:进入走跑模式
进入稳定站立模式后,可实现 “推杆即走”:
左摇杆推上下左右,控制机器人行走方向;
右摇杆推动,控制机器人原地旋转。
重要
平躺站起禁止执行场景:
当前暂不支持末端执行器为灵巧手或夹爪时,执行平躺站起动作,避免损坏灵巧手或夹爪部件。平躺站起前姿态要求:
执行平躺站起前,需将机器人调整为正面朝上的姿态。
同时确保头部、腿部、手臂、胸部、腰部、膝部等关键部位摆放正确,防止因姿态不当造成设备损坏。平躺站起地面环境要求:
需将机器人平整放置在 无坡度的硬质地面上,再启动平躺站起动作,确保动作过程稳定。
2.1.3 坐下站起开机(无需移位机)
Step 1:开箱抬出并规范摆放
按照图示打开机器人的包装箱,缓慢将机器人抬出,避免搬运中碰撞。
将机器人按照下述图示姿态摆放,便于检查机器人背部的电池电量状态或放置电池。
Step 2:安装电池 若未安装电池,可将电池从外向内滑入背部电池槽,滑至底部听到 “咔哒” 声即安装成功。安装后可尝试拉拔电池,确认其已完全卡紧。
Step2:检查电池安装及安装电池
Step 3: 开机启动
开机时,请先确认电池电量>2 格(电池电量>50%)。
短按电池背部电源键唤醒设备,随后长按 5 秒完成开机。
机器人通电后,电池的 LED1~4 指示灯会在 2 秒内依次跑马亮起,随后稳定亮灭状态指示电池电量。
Step 3:按下开机按键
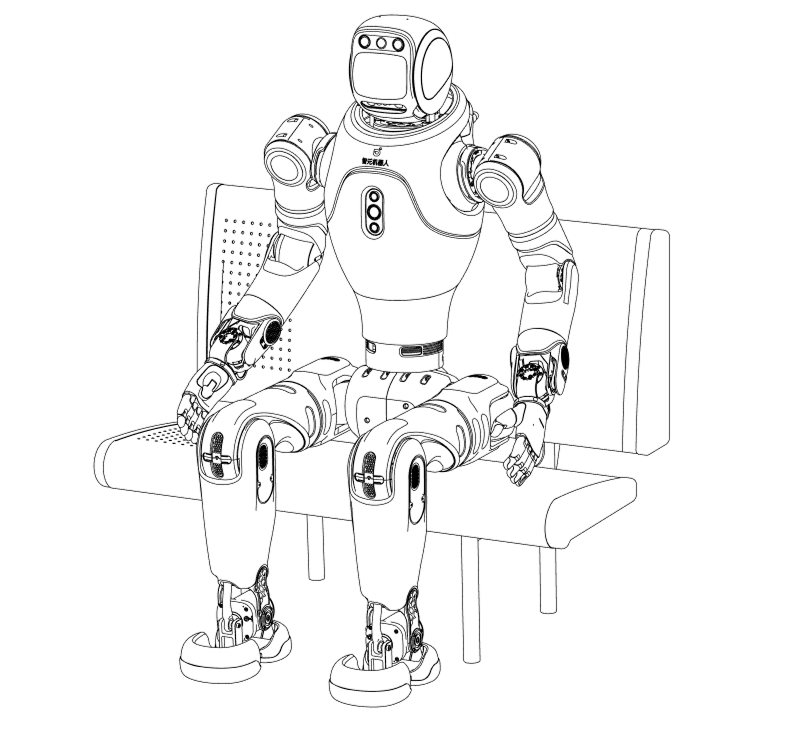
Step 4: 机器人摆放至坐下姿态
姿态调整:
将机器人摆放为图示姿态。关键要求:
需将 头部、腿部、手臂、胸部、腰部、膝部 摆至正确初始姿态,尤其注意下肢膝部正面需与整机正面一致朝前。
需将机器人放置在 高度 35–40 cm 范围内的椅子上,请注意椅子需要有靠背支撑以保持机器人平衡。
此时机器人处于零力矩模式。需人工扶着机器人后把手,辅助保持平衡。
模式触发:
同时按下遥控器 【↑ + X】 按键,机器人进入坐姿预备(位控坐下)模式。请注意此过程中需要人工扶着机器人后把手,辅助保持平衡。
Step4:机器人摆放至坐姿状态,切换坐姿预备模式
重要
机器人坐姿要求:
需按照下图例,先通过遥控器将机器人调整至坐下位控状态。同时,需将机器人放置在高度约 35-40cm 的凳子上,确保放置位置稳定。触发坐下站起动作前,必须确认机器人的双脚已完全接触地面,避免因脚部悬空导致动作异常。肢体姿态要求:
需将机器人的头部、腿部、手臂、胸部、腰部、胯部等关键部位按照图示正确摆放,且保持正面朝前,防止姿态不当情况下切换对机器人造成损坏。
Step 5: 站起开机
操作遥控器,同时短按【↑+□】按键,机器人将执行坐下站起动作,动作完成后直接进入稳定站立模式。
重要
坐下站起过程中,需人工拉动机器人后把手辅助保持平衡,防止机器人摔倒。
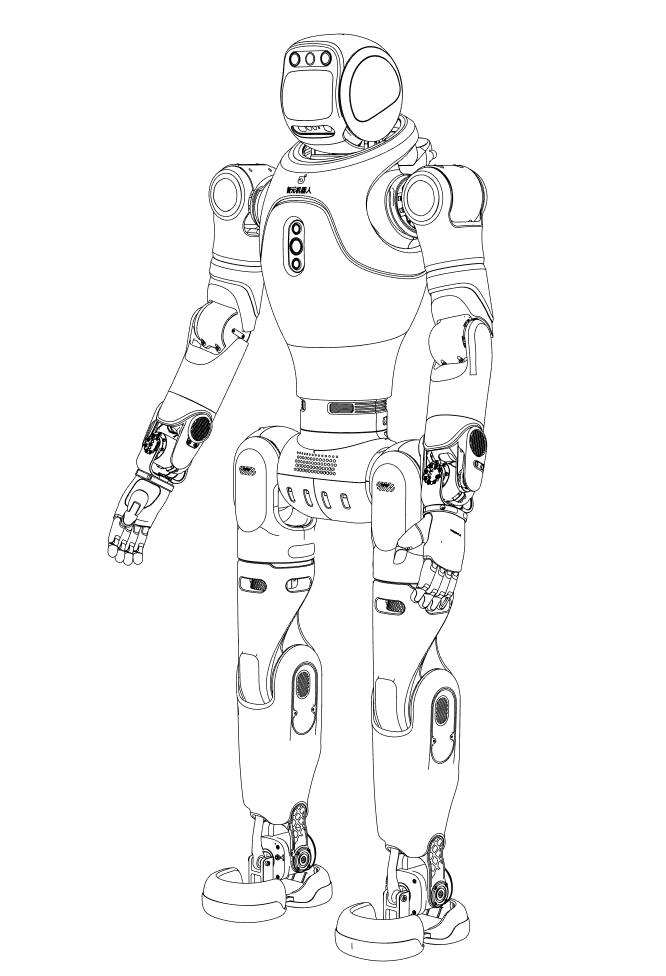
Step5:机器人站起状态
Step 6:进入走跑模式 进入稳定站立模式后,可实现 “推杆即走”:
左摇杆推上下左右,控制机器人行走方向;
右摇杆推动,控制机器人原地旋转。