2.4 关机指南
2.4.1 辅助躺下机器人(无需移位机)
重要
在机器人切换至站姿预备(位控站立)模式后且尚未完全平躺至地面前,请确保由单人或双人辅助支持,确保机器人平稳地并保持平衡。
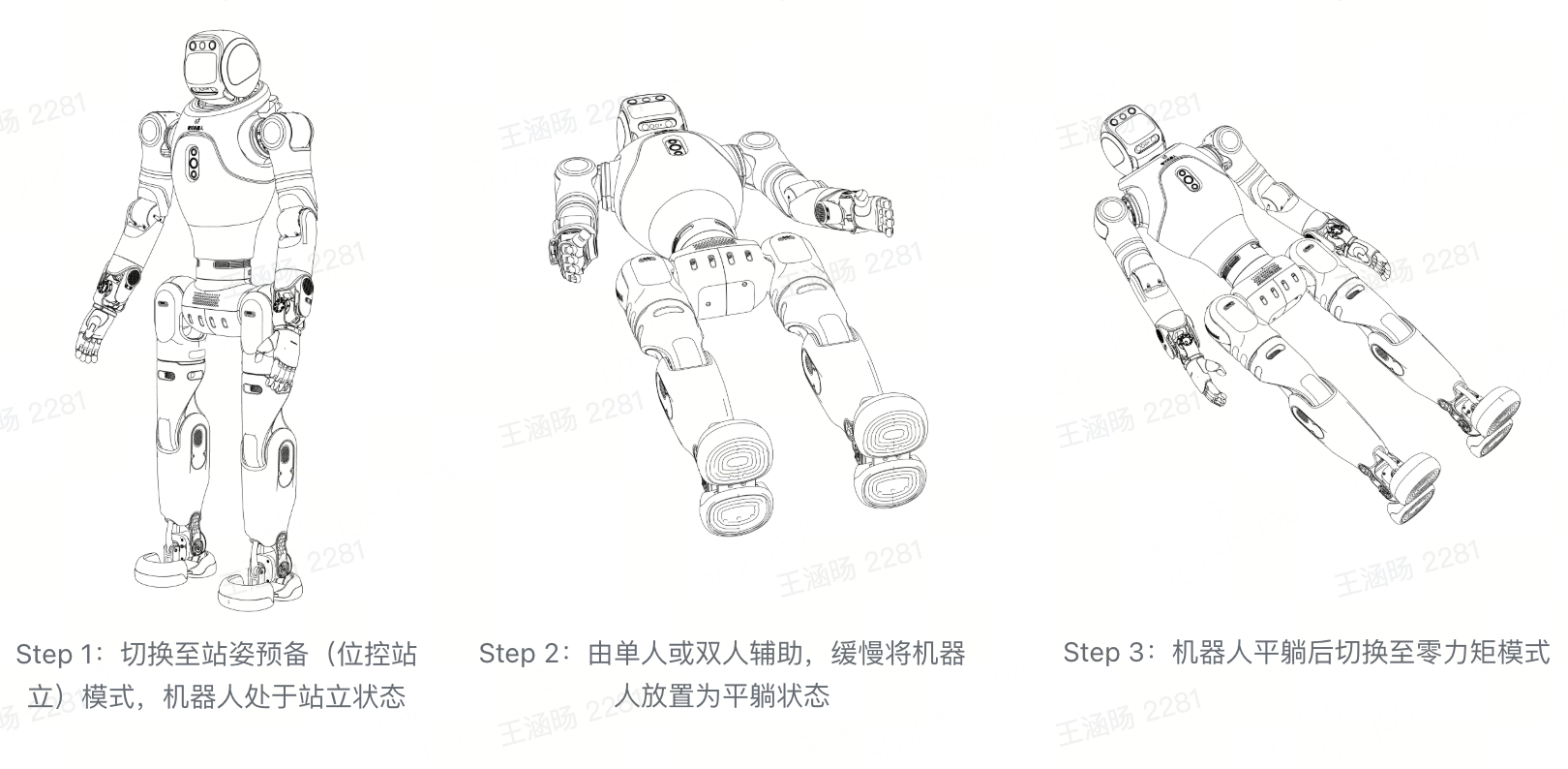
Step 1: 进入站姿预备模式(位控站立)
使用遥控器同时短按【L2 + X】键,机器人将切换至站姿预备(位控站立)模式。
操作过程中需人工从机器人后方扶住机器人背部把手,防止因失衡导致倾倒。
Step 2: 平躺机器人
将机器人从站姿预备(位控站立)模式的站立状态缓慢放倒至地面,确保过程平稳受控。
建议由至少两名操作人员配合完成,以防止机器人在放置过程中发生倾倒或姿态异常。
Step 3: 进入零力矩模式
确认机器人已处于稳定姿态,正面朝前,再操作遥控器切换至零力矩模式,以确保安全停机。
在此状态转换过程中,需人工从机器人后方扶住机器人背部把手,或让机器人背部稳定在椅背上,以保持平衡。
推荐操作流程(更安全):
先切换至阻尼模式:使用遥控器同时短按【L2 + R2 + 创建键】。
后切换至零力矩模式:使用遥控器同时短按【L1 + R1 + 创建键】。
紧急停止流程:若需立即停止动作,可直接通过遥控器操作进入零力矩模式。
Step 4:关机
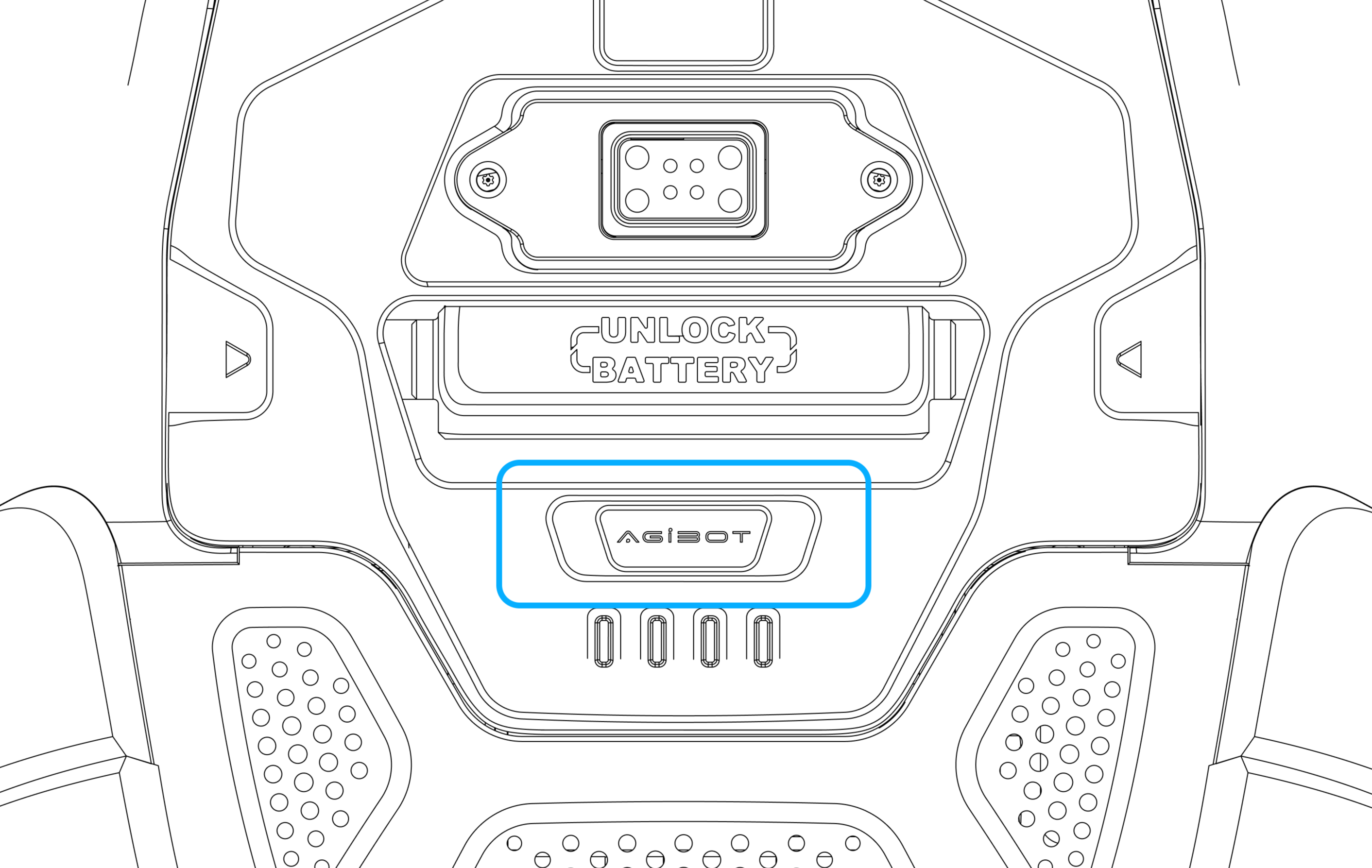
短按电池背部的电源键以唤醒设备,再长按约 5 秒完成关机。
断电过程中,电池上的 LED1~4 指示灯 将依次熄灭,表示设备已成功关闭电源。
Step 4:按下开机按键
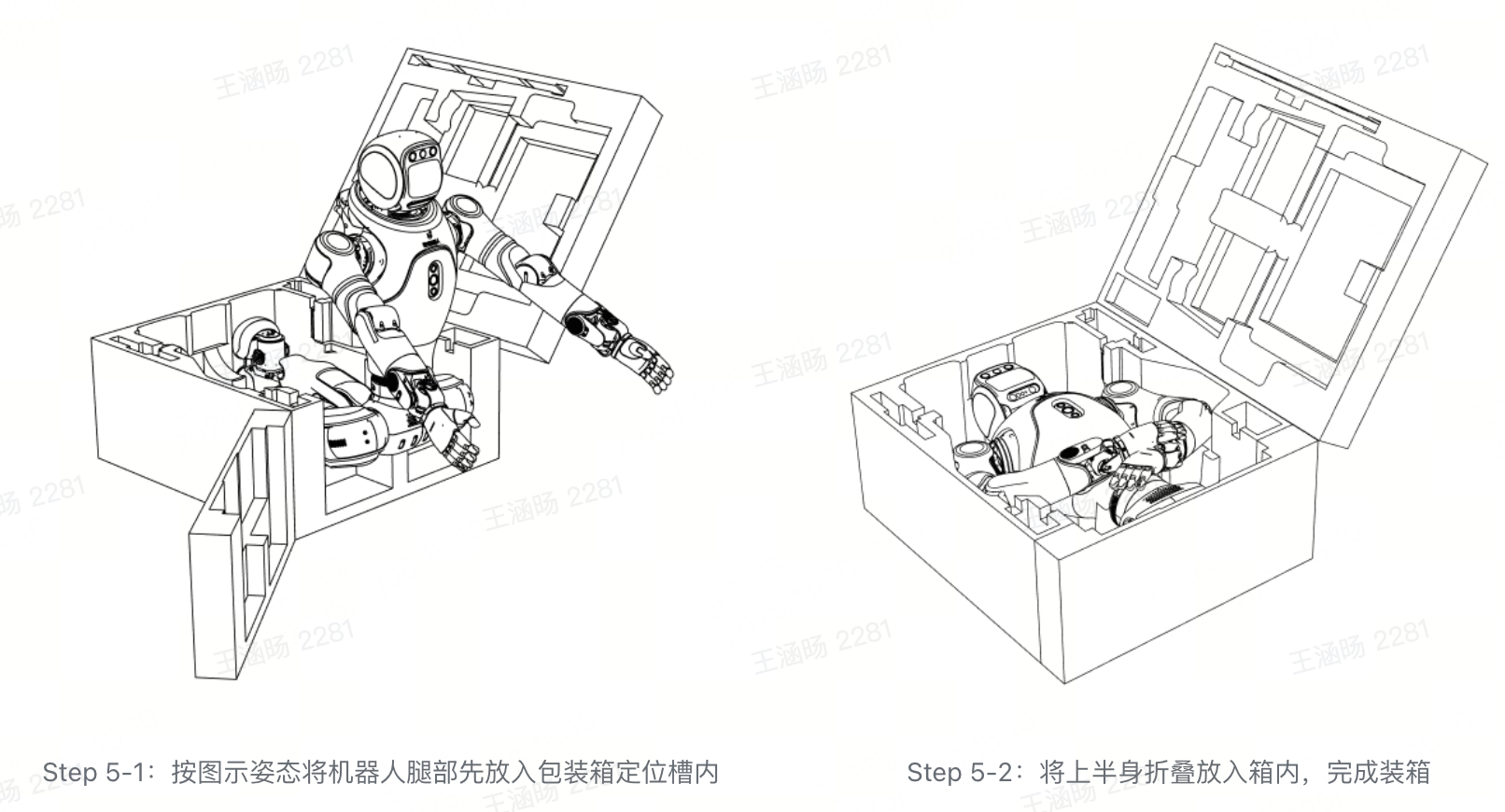
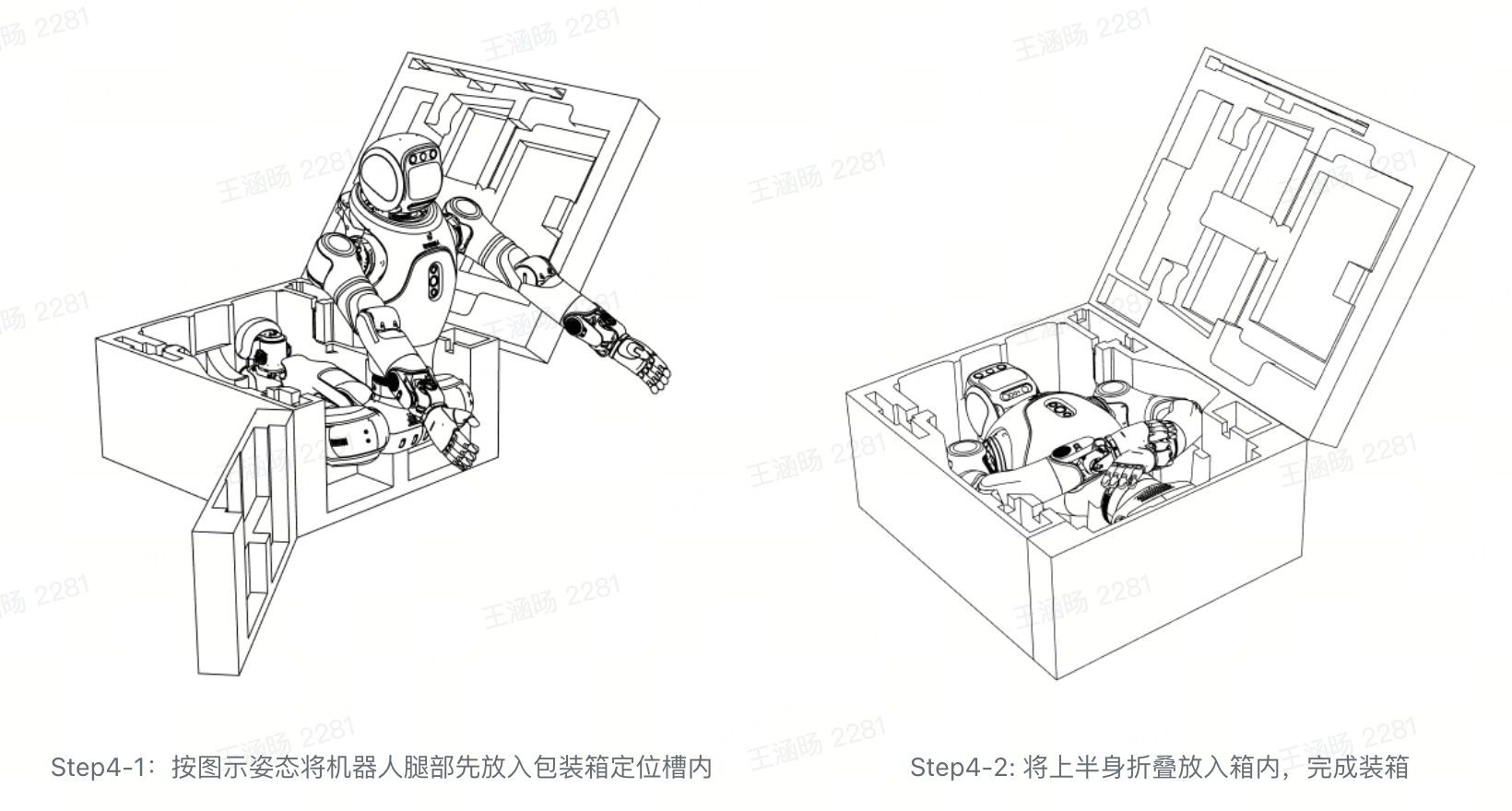
Step 5:将机器人按图示指引装箱
打开包装箱侧门,确保放置空间充足,方便将机器人放入箱内。
按照图示顺序,将机器人腿部先行放入定位槽内,再将上半身折叠放置至包装箱中。
确认机器人各部位已稳固放置于定位槽内后,关闭并锁紧包装箱。
2.4.2 坐下关机(无需移位机)
Step 1:遥控机器人坐下
使用遥控器同时短按 【L2 + ←】 键,触发机器人执行坐下动作。
请将机器人放置在高度约 35–40 cm 的稳固平台或凳子上,确保支撑平稳。
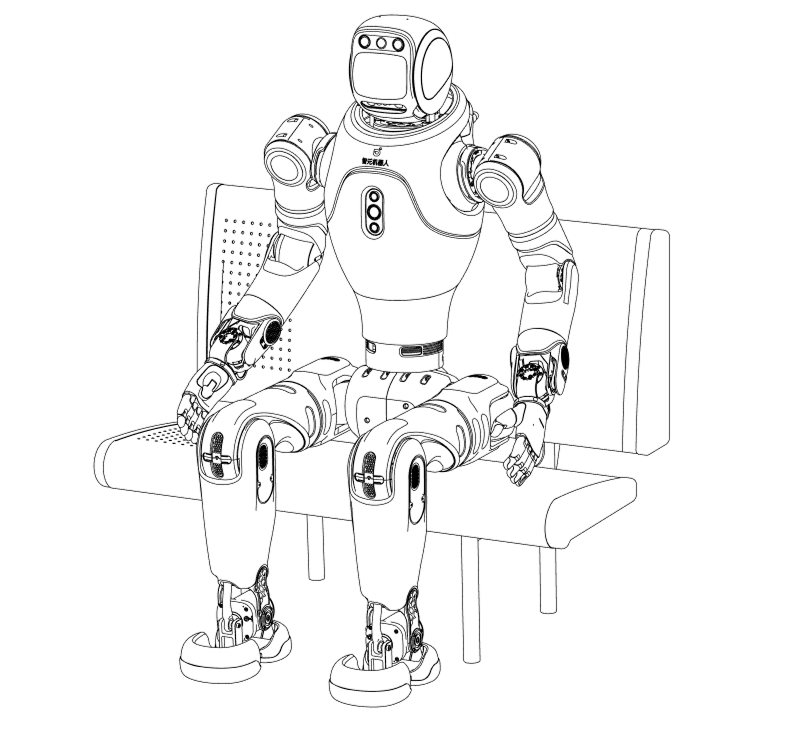
Step 1:遥控机器人执行坐下动作
Step 2:进入零力矩模式
确认机器人已处于稳定坐姿、正面朝前,再操作遥控器切换至零力矩模式,以确保安全停止。
在状态切换过程中,需人工从后方扶稳机器人背部把手,或让机器人背部稳定倚靠在椅背上,以保持平衡,防止在零力矩模式下摔倒。
推荐操作流程(更安全):
先切换至阻尼模式: 使用遥控器同时短按 【L2 + R2 + 创建键】。
再切换至零力矩模式: 使用遥控器同时短按 【L1 + R1 + 创建键】。
紧急停止流程: 若需立即停止动作,可直接通过遥控器操作进入零力矩模式。
Step 3:关机
短按电池背部的电源键以唤醒设备,再长按约 5 秒完成关机。
断电过程中,电池上的 LED1~4 指示灯 将依次熄灭,表示设备已成功关闭电源。
Step 3:按下开机按键
Step 4: 将机器人按图示指引装箱
打开包装箱侧门,确保放置空间充足,方便将机器人放入箱内。
按照图示顺序,将机器人腿部先行放入定位槽内,再将上半身折叠放置至包装箱中。
确认机器人各部位已稳固放置于定位槽内后,关闭并锁紧包装箱。
重要
遥控机器人坐下过程中,请确保机器人能够稳固坐在高度约 35–40 cm 的凳子或平台上,并有椅背支撑。
从坐下姿态切换至零力矩模式过程中,需由人工从后方扶稳机器人背部把手,协助保持平衡,防止机器人摔倒。