版本
感知配置
感知能力
X2 探索版暂未发布
交互 RGB 相机
交互 RGB 相机:支持人机交互场景下的视觉识别与响应。
X2 旗舰版
激光雷达RGBD 深度相机前视双目 RGB 相机前视交互 RGB 相机后视 RGB 相机
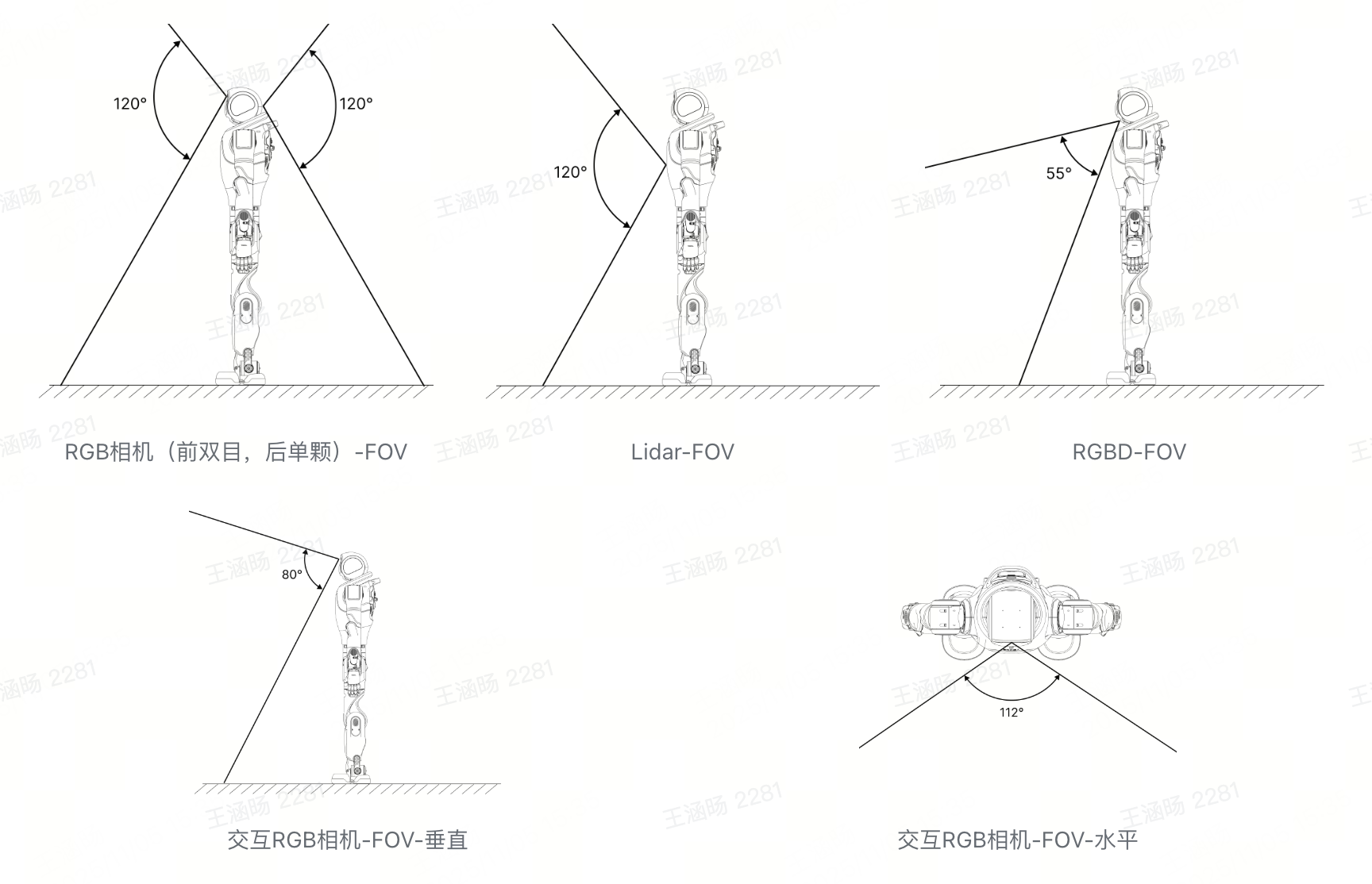
激光雷达:a. 实时采集高精度环境数据;b. 快速识别与测量周边物体;c. 输出高分辨率点云数据,为环境感知提供核心支撑。除胸口激光雷达外,额外配置多类型相机,感知设备更丰富,具体包括:a. 深度相机:辅助获取物体三维空间信息;b. 双目相机:提升环境立体感知与距离判断精度;c. 后视相机:覆盖后方视野,补充环境感知盲区;d. 交互相机:支持人机交互场景下的视觉识别与响应。
传感器视场角示意图